
Friction Cooling: Threshold Effects Stop Robot Swarms
Understanding the Cooling Effect of Static Friction in Robot Swarms
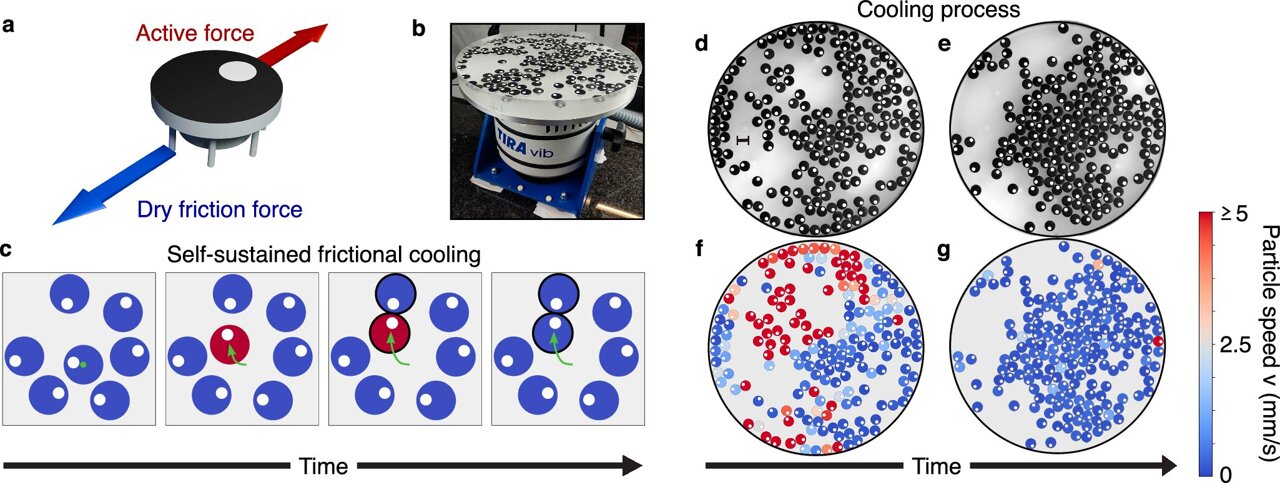
Scientists have made a groundbreaking discovery about how to bring a large group of active robots to a standstill without external intervention. This phenomenon involves using static friction to remove kinetic energy from colliding robots, effectively stopping them from moving. The research was conducted by physicists at Heinrich Heine University Dusseldorf (HHU) and La Sapienza University in Rome. Their findings reveal that static friction plays a crucial role in this process.
Static friction is the force that prevents two surfaces from sliding against each other. When two objects are in contact, static friction holds them in place until the applied force exceeds a certain threshold. In the case of robots, this principle can be harnessed to create self-sustained cooling effects. During collisions, static friction efficiently dissipates the kinetic energy of the robots, making it impossible for them to move again unless an external force is applied.
This concept has significant implications for the development of robot systems. By leveraging the natural properties of static friction, researchers can design more efficient and controllable robotic swarms. The study, published in Nature Communications, highlights how this fundamental effect can be used to construct moving robot systems that operate autonomously.
Friction is a common occurrence in everyday life, such as when rubbing hands together in cold weather. It generates heat and consumes energy. For example, road friction on vehicle tires causes a car to slow down unless the accelerator is pressed. Similarly, when two solid bodies are placed on top of each other, they remain stationary due to static friction. Only when the angle of tilt exceeds a critical point will the top object slide off.
In physics, static friction is referred to as "dry" friction or Coulomb friction. It plays a vital role in various applications, including the movement of grains in a silo. The activity of these particles is not constant but fluctuates, leading to a stop-and-go motion. A particle at rest is considered "cold," while one in motion is "hot." Static friction ultimately causes the cooling of active particles by bringing them to a standstill.
Researchers led by Professor Dr. Hartmut Lowen studied the behavior of many active objects, including hundreds of 3D-printed mini-robots driven by a vertically vibrating plate. These robots continuously collided with each other, and under conditions of high density and low driving force near the threshold, static friction caused the robots to stop moving. Over time, this led to the formation of clusters of non-moving robots.
Professor Lowen noted that interestingly, large clusters dynamically changed, creating a mixed configuration where cold areas coexisted with hot ones. In equilibrium, this would be impossible because temperature differences would immediately cancel out through collisions.
The cooling effect is the result of an interplay between the forces of activity and Coulomb friction. Extensive computer simulations conducted at HHU confirmed similar behavior in the experiment. Study lead author Dr. Alexander Antonov found that the threshold behavior was the underlying principle. He stated that this achievement represents a dream for many theoretical physicists—to understand the physical mechanism behind an experimental phenomenon and reproduce it in numerical simulations.
Professor Caprini believes there is potential for future applications. He emphasized that no outside intervention is required to cool the system. Instead, the robots can cool themselves down through collisions. Professor Lowen added that this unexpected cooling effect could be used to automatically control entire armies of robots or the collective behavior of bulk materials without external intervention.
The study, titled Self-sustained frictional cooling in active matter, was published in Nature Communications. It provides valuable insights into the use of static friction for controlling robotic systems and offers new possibilities for future technological advancements.
{kind=link}
Posting Komentar untuk "Friction Cooling: Threshold Effects Stop Robot Swarms"
Posting Komentar